Researchers build a fake fish that proves mighty fine at fin-flapping.
Use this article about a technological development as an example of biomimicry being used by engineers to improve systems. It would be suited to students in years 4, 5, 7, 8, 9, and 10 studying Biological, Physical or Chemical Sciences.
Explore 3D printing in more detail by downloading our STEM Pack below.
Word Count: 370
The study, published in the journal Science Robotics, was inspired by the belief that observing and mimicking high-frequency swimming in nature may enhance the performance of bio-inspired underwater vehicles.
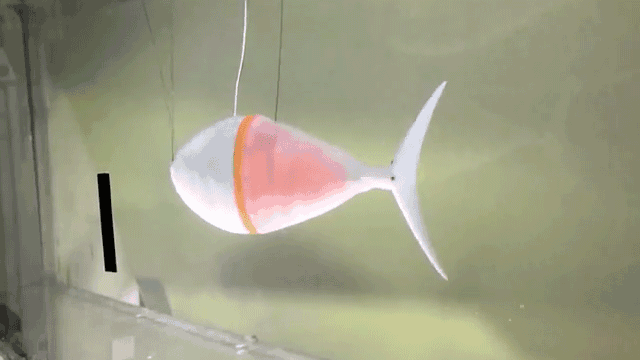
Led by Joseph Zhu, from the Bio-Inspired Engineering Research Laboratory at the University of Virginia, US, the team based the design of 255-millimetre-long Tunabot on yellowfin tuna (Thunnus albacares) and Atlantic mackerel (Scomber scombrus) – species from the Scombridae family renowned for high-performance swimming while escaping from predators or pursuing prey.
An international team’s robotic fish – dubbed Tunabot – has recorded impressive speeds and energy efficiency during tests designed to explore the performance of swimming fishes.
Fish swim by generating a wave-like motion that passes along the body from head to tail; increasing the frequency of this undulation increases swimming speed.
The report notes that this type of body propulsion is a versatile system of locomotion: a single fish species may be capable of tail beat frequencies that range from 0.1 to beyond 20 Hz, resulting in swimming speeds of more than 20 body lengths per second.
A number of robotic models have been built to mimic this efficient swimming style, but most still operate at low frequencies (less than two Hertz) and achieve speeds of 0.25 to one body length per second. They require major power consumption to maintain these speeds.
In experiments, although loosely tethered to an external controller (which minimally constrained its movement), Tunabot – made of 3D printed resin and steel covered in elastomer skin – demonstrated similar frequencies to its Scombrid inspirations.
It was able to reach frequencies of up to 15 Hertz, which equates to a swimming speed of about four body lengths per second.
Based on using a 10-watt-hour battery pack, Tunabot has a range of 9.1 kilometres at a speed of 0.4 metres/second, or about 4.2 kilometres at one metre/second.
“Whereas biology can inspire a high-performance robotic platform, development of such a platform will also provide an opportunity to experimentally study both high-speed swimming and the function of features unique to high-performance fishes,” the researchers write.
“This feedback loop between bio-inspired robotics and robotics-inspired biology creates a framework for combining biological features into a robotic platform to optimise performance in ways that may eventually surpass biological function.”
Login or Sign up for FREE to download a copy of the full teacher resource